美国亚特兰大肯尼索州立大学 Intelligent Dexterity (InDex) Lab 2026春/秋 博士 招生
15647
学校:Kennesaw State University (KSU), Department of Robotics and Mechatronics Engineering
实验室:Intelligent Dexterity (InDex) Lab
导师:Dr. Lingfeng Tao(助理教授)
本实验室近期获得 NSF国家科学基金会 与 NVIDIA英伟达学术资助,科研成果稳定,每年在 ICRA, IROS, IEEE RA-L 等顶级会议/期刊 发表 5–8篇论文。现面向 2026春/秋 招收数名博士研究生 (PHD/RA)。
待遇与支持
研究方向
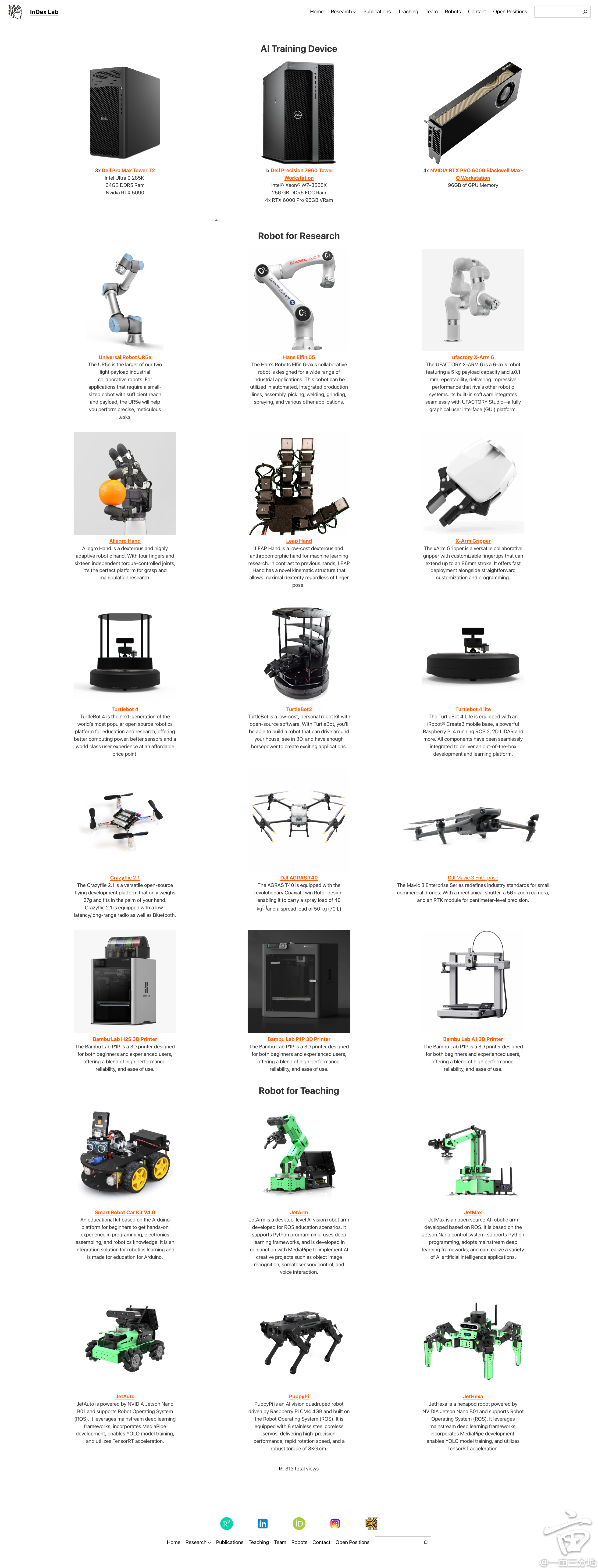
实验室硬件与资源
导师与科研环境
Dr. Lingfeng Tao 的研究方向涵盖 学习型机器人控制、自动化系统与人机协作,已在 ICRA、IROS、IEEE RA-L、SMC、CNS、ROBIO 等顶级会议/期刊发表多篇论文,主持/参与科研经费超过 $3.8M。实验室氛围开放,鼓励学生发表论文、参与国际学术交流。
招生要求
申请方式
📅 2026秋季入学截止日期:2025年11月17日
有意申请者请将 简历、成绩单、研究兴趣陈述 发送至:
邮件标题请注明 “PhD Application – InDex Lab – Your Name”。
补充内容 (2025-09-23 03:34 +08:00):
更正:2026春季入学截止日期:2025年11月17日
实验室:Intelligent Dexterity (InDex) Lab
导师:Dr. Lingfeng Tao(助理教授)
本实验室近期获得 NSF国家科学基金会 与 NVIDIA英伟达学术资助,科研成果稳定,每年在 ICRA, IROS, IEEE RA-L 等顶级会议/期刊 发表 5–8篇论文。现面向 2026春/秋 招收数名博士研究生 (PHD/RA)。
待遇与支持
- 提供 全额奖学金 与 学费减免
- 充足的科研硬件与算力支持
- 丰富的学术与工业职业发展机会
研究方向
- 深度强化学习 (Deep Reinforcement Learning, DRL),Vision-Language-Action (VLA) 模型
- 灵巧操作与机器人手 (Dexterous Manipulation)
- 多机器人协作与规划 (Multi-Robot Coordination and Planning)
- 人机交互与远程操控 (Human-Robot Interaction & Teleoperation)
- 机器人感知与多模态传感融合 (Robotic Perception & Multi-Modal Sensor Integration)
- 仿真到现实迁移 (Simulation-to-Real Transfer, MuJoCo, Isaac Lab 等)
实验室硬件与资源
- 机器人平台:机械臂、灵巧手、机器狗、无人机、轮式机器人
- 计算平台:
- 服务器:配备 4× NVIDIA RTX 6000 PRO 96GB GPU
- 每位学生分配 个人工作站(RTX 5090 GPU)
- 多模态传感与交互设备,支持高水平科研
导师与科研环境
Dr. Lingfeng Tao 的研究方向涵盖 学习型机器人控制、自动化系统与人机协作,已在 ICRA、IROS、IEEE RA-L、SMC、CNS、ROBIO 等顶级会议/期刊发表多篇论文,主持/参与科研经费超过 $3.8M。实验室氛围开放,鼓励学生发表论文、参与国际学术交流。
招生要求
- 专业背景:机械工程(ME)、电气与计算机工程(ECE)、计算机科学(CSE)或相关领域
- 技能要求:
- 熟练掌握 Python/C++
- 熟悉 PyTorch/ROS/MuJoCo/Isaac Sim 更佳
- 个人特质:科研动机强,具备独立解决问题的能力
申请方式
📅 2026秋季入学截止日期:2025年11月17日
有意申请者请将 简历、成绩单、研究兴趣陈述 发送至:
邮件标题请注明 “PhD Application – InDex Lab – Your Name”。
补充内容 (2025-09-23 03:34 +08:00):
更正:2026春季入学截止日期:2025年11月17日
